
OpenDroneMap and Uhurulabs do Kerela
Okay so I am finally writing this post. My initial target was to have it done by the end of January, but that slipped so next target was mid Feb, and that has slipped but better late than never!
Last year I together with Stephen Mather of OpenDroneMap were privileged to be invited to Kerala, India by International Centre for Free and Open Source Software (ICFOSS) to run a workshop on open source solutions for processing drone imagery and open hardware drone solutions. Checkout Stephen’s blog post here. As usual I was nervous, although I have been diving deep into the topics the past few years, I still get nervous when I am going to do a presentation or workshop.
Was a little hard leaving home, I don’t like leaving my girls for more than a couple of days, and even though this was only going to be 5 days, India felt like a long way away.
I left very early from home, but as usual the traffic in Dar es Salaam is totally unpredictably. By about half way it was clear I was not going to make it, so I started considering my options. Only one really, get a Bodaboda, or rather two Bodaboda’s, one for me and one for my luggage.



Got to the airport in time and was able to board the flight to first Dubai and then India.
Arrived in India quite late at night around 4am, as usual I was a little concerned about getting through customs with all the gear but it was no problem at all, even with the big ebee case(link), and the tons of drone bits in my bags. Once outside the airport the person who was there to collect me seemed to recognize me immediately, (maybe he was told to look for the black guy with dreads!). He took me straight to the guest house which was on the Trivandrum Technopark campus, and within 20 mins I was in my room and about to get some rest, (by then it was 5am), when there was a knock on the door! I opened and there was a guy standing, telling me that they are ready to leave in 30 mins…
Although the organization that had invited us was based in Trivandrum Technopark, India’s Largest IT Park, the actual workshop was to be held at Vagamon some 190 km a hill station at least 5 hours drive.I have to admit I was a little rough saying “NO I have to get some rest”, he went away for a while and then came back to let me know it was okay, I would go later with another group! Nice, I could get some sleep.
Woke up around 10am, and of-course top priority was INTERNET! Unfortunately the guest house did not have internet, which seemed kinda strange as it was on a science park, so went off wondering to see if I could get a sim card. After wondering around for about an hour and talking to a number of people it seemed that you need an Indian ID to get a sim card, not so sure that was true, but figured I ought to get back to the guest house in-case my host was looking for me. Lucky I did as someone from my host turned up a few minutes later and we headed together to the ICFOSS offices.
I spent a couple of hours at the ICFOSS office, got online, checked in with my family back home and checked my emails etc. Then headed back to the guest house because the plan was to drive up into the mountains at around 17:00.
The drive was great, a little long, but it was so nice to see some of the Kerala countryside, arrived pretty late partly because we had stopped along the way to eat, FYI what people in Kerala consider junk food, many would consider a healthy snack!




Once at the place we were spending the night Stephen and I spent some time planning the following day and then everyone got some much needed rest.
In the morning we headed to the place where we were going to hold the classroom part of the workshop. Before the rest of the attendees showed up we had some time to work on the Ranger, ahead of its maiden flight that was planned for the afternoon. We had good attendance, Arun M the lead from ICFOSS together with the core drone team, Deepthi, Vaisakh, and Asishwith, plus other ICFOSS staff, members of the Kerala electricity board, Veenus and Manoj from 1074 Vectors and others. All in all we had people from different sectors of government, startups and some more mature private sector companies.



Stephen started off the workshop with introductions and then it was over to me to talk about some of the work we have been doing in Tanzania. For the most part I covered how drones had helped us with the mapping of several flood prone areas of Dar es Salaam in the Ramani Huria Project, and how the biggest project yet the mapping of Zanzibar with low cost drones, had gone on to win awards and really helped validate all the work we were doing. It was great to have representatives not only from government, but also from the private sector, all keen and interested in how drones could help their particular needs. I left them with some thoughts about how to engage with the relevant government stakeholders to ensure that not only were they building technical expertise, but also ensuring a regulatory framework that would encourage innovation and be supportive of local businesses. The afternoon was supposed to be a field session were the group would actually see some drones in action. One of the guys from ICFOSS and I went hunting for a good place for take-off and landing.
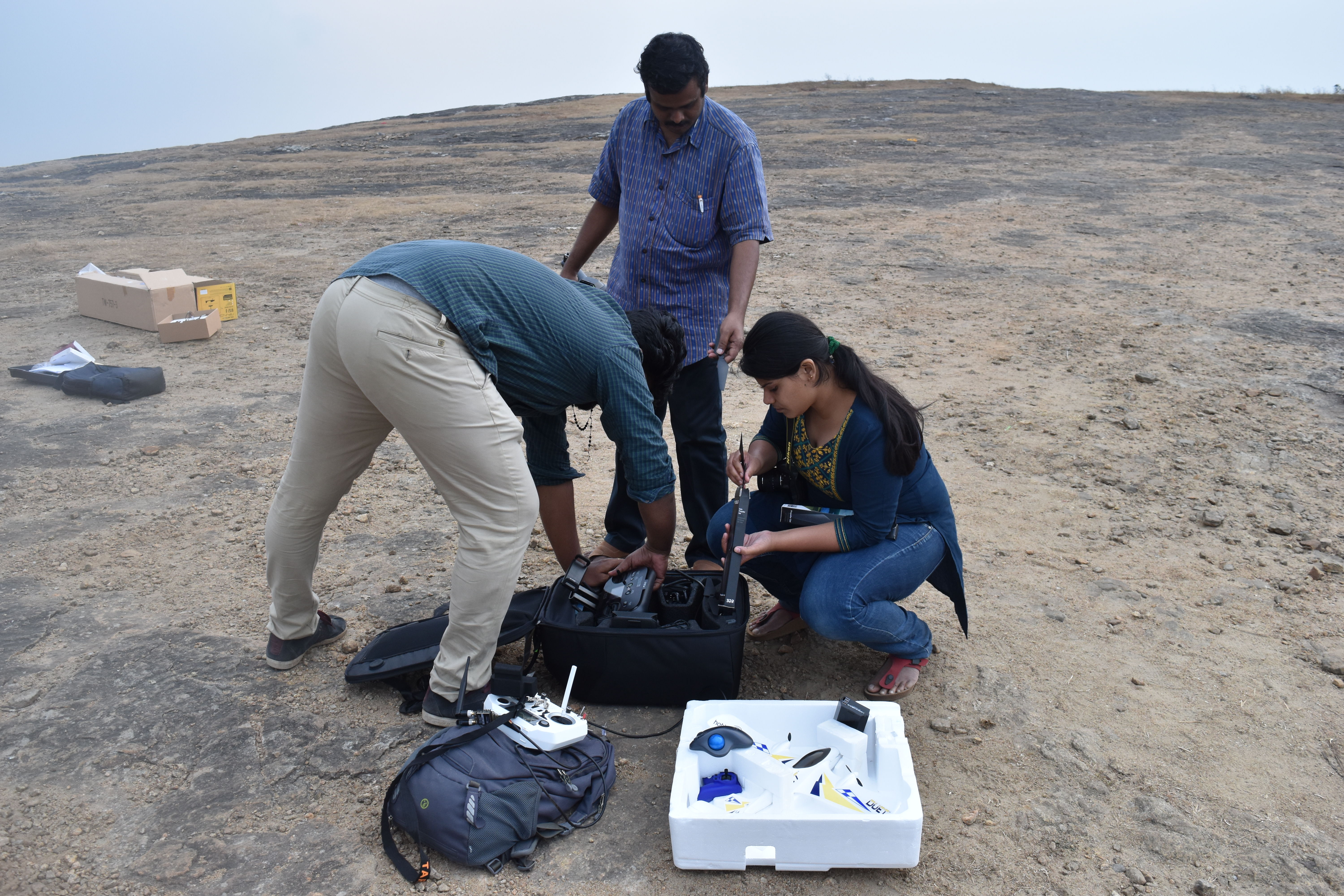
We were lucky and found a great spot, so we started with out field setup, we actually had quite a few drones with us…
- Hobby King Duet. Small fixed wing, basically a park flier that can take a beating and keep flying making it perfect for training.
- SenseFly Ebee, a great platform even if its proprietary.
- DJI Mavic, easy to use consumer drone.
- Homemade quad-copter build around a pixhawk.
- 3DR Solo
- Ranger RX




The aim for the afternoon session was to demonstration how both a multi-rotor, (3DR SOLO), and a fixed wing (Ebee), can be used for mapping highlighting the difference and when each is most appropriate. Best case we were hoping to do some actual mapping with both platforms so that we could have some data that could be used for the OpenDroneMap processing demonstrations. Everything went perfectly, both the ebee and the 3dr solo were used to gather some data, and we even had some time to play around with the Mavic and really show the group how far consumer drones had come.









You may be asking yourself why we had a SenseFly Ebee at a workshop that was about OpenSource and OpenHardware? As it stands I still heavily recommend someone who is exploring the use of UAVs for mapping and other survey activities to get an Ebee IF their budget allows. I say this because the Ebee is a platform that just works, it comes with both the flight planning software, processing software, (Pix4D) and an excellent support infrastructure that is critical when you are getting into this field. Things will go wrong, and it’s nice in the beginning to minimize the things that could go wrong, and to have an organization that provides excellent support available, should you need it. There are many times when I have been out in the field doing a client survey and I have had to call SenseFly support to help get on some technicality or the other. Another reason why I recommend the ebee especially in countries where regulations are still in their infancy if they exist at all, is because of the extremely low risk the low weight of the ebee poses to people or property in the case of an accident, although I would not advise it there is even a video of a Danish firm doing a “test”.

That evening we all huddled together around the table planning for the next day. I processed the data we had collected during the day, Stephen and Deepthi planned the flights they expected to do the following day, and even decided to use the elevation data from my flights to plan other flights what we would do the following day. This was a great opportunity to show how valuable data generated from a quick drone survey could be, after just 2 hours in the field we already had elevation data that was more accurate than we could get from Google.
The following day we planned to do some quick flights in the morning and then head back to the city so that on the last day we could do some classroom data processing work. The flights went almost too perfectly, in my opinion you have not flown till you have crashed. The last flight of the 3DR Solo was done by Deepthi, and unfortunately, (or fortunately), there was a small issue during landing which broke 2 props, no huge issue and props are “consumables” anyway! This was also the last chance to test the , the area was not perfect, but we gave it a try anyway, Stephen on the controls, (the only one with real manual fixed wing experience), fact is though the runway was just not long enough and he had to abort at the last moment, one broken prop but the UAV still in perfect condition.







Friday was the last day of the workshop held at the ICFOSS offices. Usually such workshops start with lots of time being wasted installing software and actually getting the environment ready. Not at ICFOSS, they had everything ready, a server already setup with OpenDroneMap, and a room setup with laptops for the participants. I wish every workshop I was involved with went this well. I won’t go into detail but some highlights were:
1) Everyone was able to connect to the ODM server and create their account without issue.
2) Everyone after a little bit of instruction was able to upload their data-set, and get the processing done.
But that was not the most impressive thing, while Stephen was driving the workshop I was preparing a 3D model of the work that I had made from the data using Pix4D. I have to admit was I was quite looking forward to showing it off, until I turned around and saw something very similar on one of the participants screen. I wandered over to ask what it was and it turns out, it was the 3D mesh from the work he had just done with OpenDroneMap, being rendered on windows using meshlab. I was humbled, excited and impressed all at once.
We closed the workshop, with clear plans on how we would like to move forward, and exciting possibilities of future collaboration, and a very strong feeling that there is so much we can learn from each-other. That evening we had a great tour of Kerala with Arun and Jucar, which ended with a great meal on the beach. All in all I really enjoyed this trip, and looking forward to my next, (hopefully with my family this time), and to the great collaborations that I hope will come from it between Uhurulabs, OpenDroneMap and ICFOSS.





